研究テーマ
→

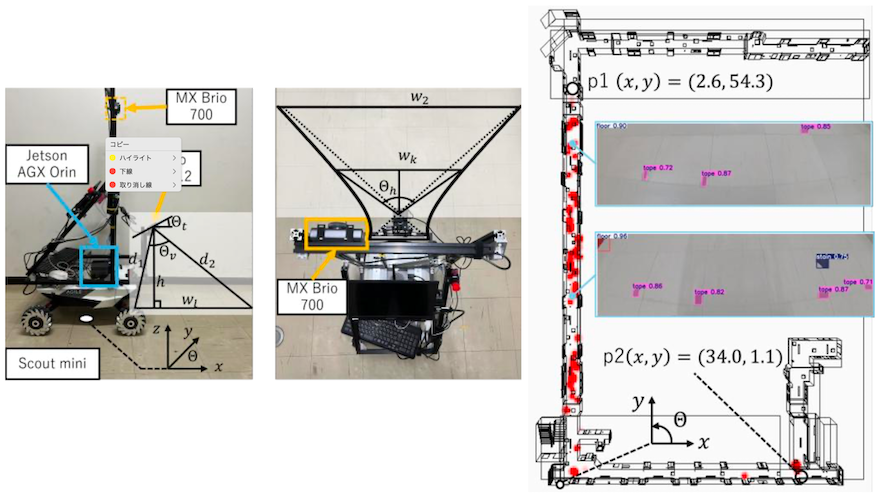
可変ゾーニング工場における搬送ロボットの自動化
設備配置の変更が頻繁な工場にも適用できるVGM位置推定により搬送ロボットの自動化を目指します。
→
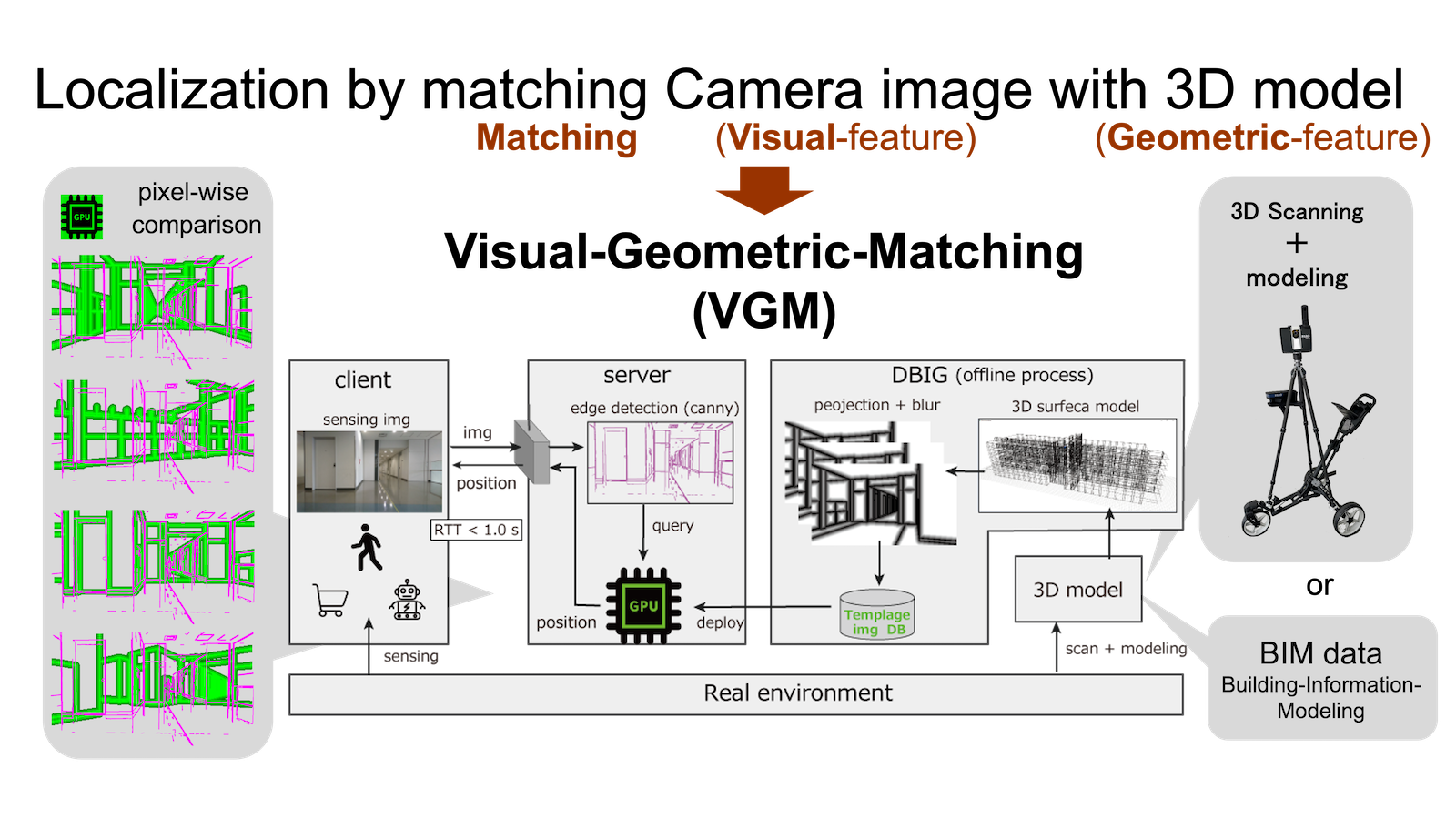
VGM の高度化
Ceiling-VGM、Panorama-VGMなどの派生を展開し、NDT融合や最適化統合に取り組んでいます。
準備中

図書館における誤配架検出システム
誤配架図書を検出し、マップ上で可視化することで効率的な運用を支援します。
準備中
施設カストーディアルのための清潔度モニタリング
汚れ分布を定量化し、きめ細かな清掃計画の策定を支援します。
準備中

農作業補助ロボットの自律移動
屋外環境における自律走行と作業支援の実現を目指します。
準備中
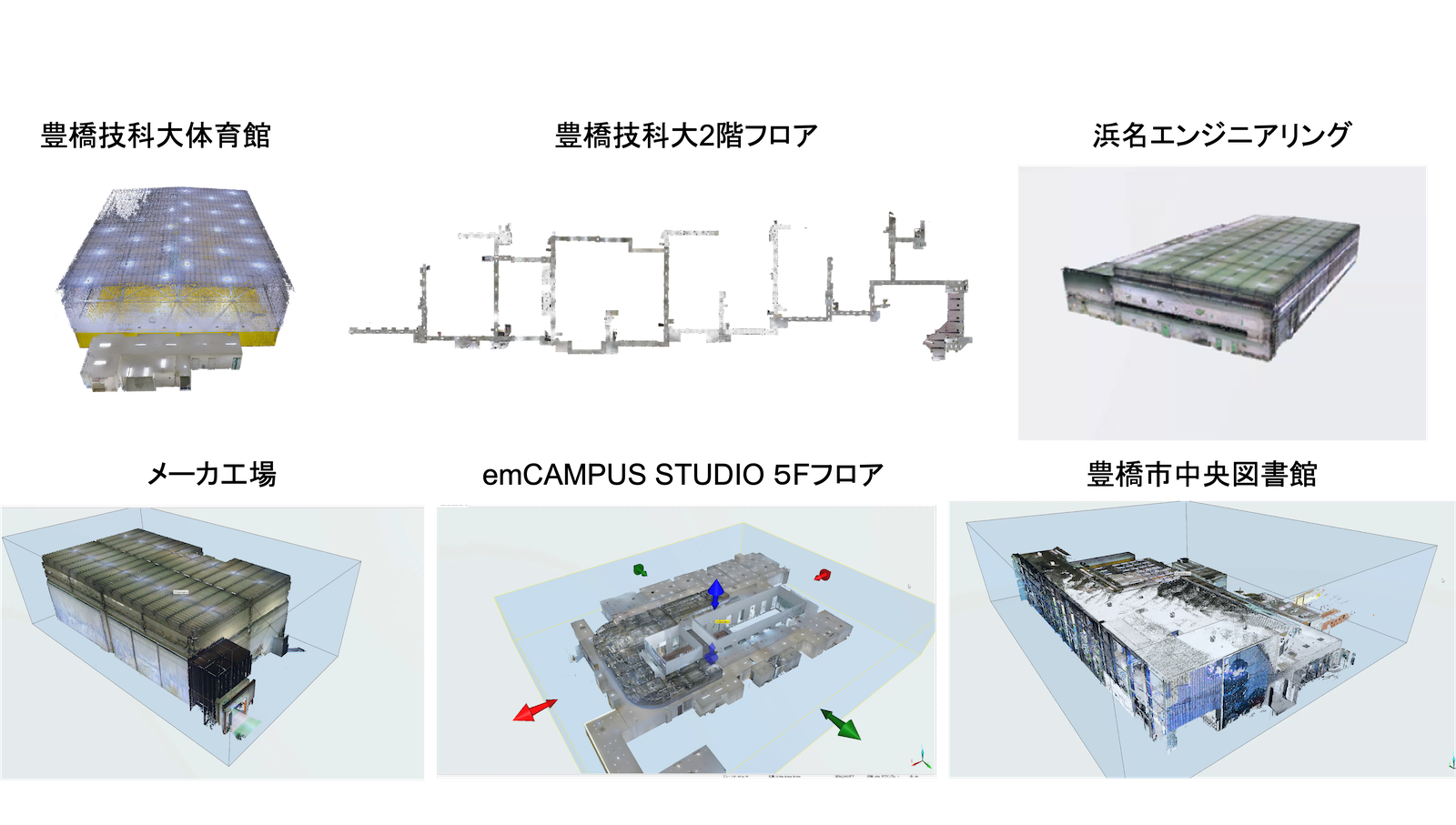
参照マップ作成の効率化
3Dモデル構築の自動化と効率化を推進します。
準備中

複数AMRの協調制御
拡張性と安定性を兼ね備えた協調搬送システムを構築します。
準備中

自律システム
情報と行為の関係から自律性を理論的に探究します。